

|
Miernik częstotliwości - tester rezonatorów (ATmega48) | |
|
|
'Obliczanie błędu zliczania miernika częstotliwości Fin = 100000000 'mierzona częstotliwość wejściowa [Hz] CLK = 4000000 'idealna częstotliwość bazowa miernika [Hz] Ferr = 1000 'odchyłka częstotliwości CLK [Hz] Tm = 1/CLK*1000000 'idealny czas pomiaru [s] Terr = 1/(CLK+Ferr)*1000000 'czas pomiaru z odchyłką [s] Cerr = Fin*Tm - Fin*Terr 'błąd zliczania (+/- zboczy) msgbox "Cerr = "&Cerr&" [edges]"&chr(10)&"Cerr = "&Cerr*4&" [Hz]",64,"Frequency meter counting error"Przykład: przy CLK = 4 MHz i Fin = 100 MHz (Tm = 0.25s) wynik zliczania Cn = Fin*Tm = 25000000 zboczy, a więc
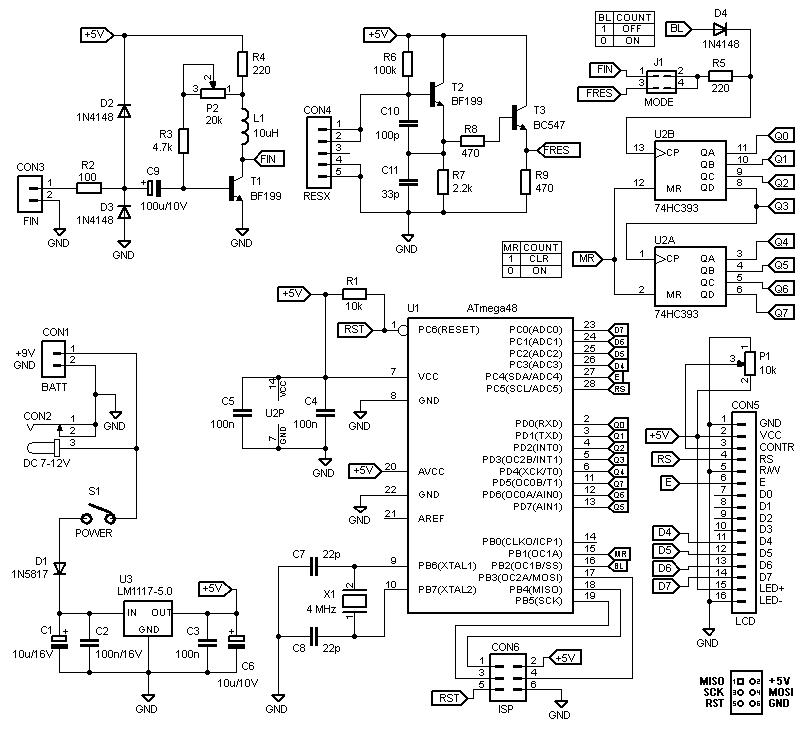
| Rezystory: R1 - 10k R2 - 100 R3 - 4.7k R4, R5 - 220 R6 - 100k R7 - 2.2k R8, R9 - 470 Kondensatory: C1 - 10u/16V C2 - 100n/16V C3-C5 - 100n C6 - 10u/10V C7, C8 - 22p C9 - 100u/10V C10 - 100p C11 - 33p Cewki: L1 - 10uH (dławik) | Potencjometry: P1 - 10k (stojący) P2 - 20k (Helitrim) Diody: D1 - 1N5817 D2-D4 - 1N4148 Tranzystory: T1, T2 - BF199 T3 - BC547 Rezonatory: X1 - kwarcowy 4 MHz (niski) Układy scalone: U1 - ATmega48/88/168/328 U2 - 74HC393 U3 - LM1117-5.0 | Przełączniki: S1 - 2 pozycje, 1 sekcja (ON/OFF) Złącza: CON1, CON3, S1 - goldpin 2x1 (męskie) CON2 - gniazdo zasilania DC-Jack CON4 - precyzyjne SIP5 (żeńskie) CON5 - goldpin 16x1 (żeńskie), wysokość 8-9mm nad PCB CON6 - goldpin 3x2 (męskie) J1 - goldpin 2x2 (męskie) Inne: U1 - podstawka DIP28 zwykła (wąska) U2 - podstawka DIP14 zwykła (wąska) CON5 - wyświetlacz LCD 2x16 znaków z przylutowaną listwą kołkową goldpin 16x1, o wysokości 9mm nad PCB. 2x tuleja dystansowa z gwintem wewnętrznym M2-M3, wysokość 11-12mm nad PCB. 4x śruba M2-M3, długość gwintu 4-6mm J1 - zworka 2x1 |