

|
Dekoder pilotów IR (ATmega168) | |
|
|
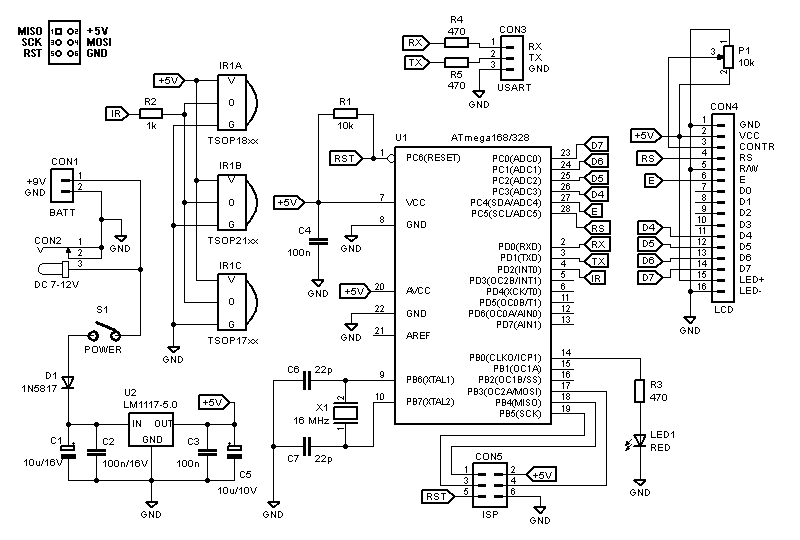
 Rysunek 1  Rysunek 3 |
 Rysunek 2  Rysunek 4 |
| Rezystory: R1 - 10k R2 - 1k R3-R5 - 470 Kondensatory: C1 - 10u/16V C2 - 100n/16V C3, C4 - 100n C5 - 10u/10V C6, C7 - 22p Potencjometry: P1 - 10k (stojący) | Diody: D1 - 1N5817 LED1 - czerwona 5mm Odbiorniki IR: IR1 - TSOPXXxx (patrz opis) Rezonatory: X1 - kwarcowy 16 MHz (niski) Układy scalone: U1 - ATmega168 lub 328 U2 - LM1117-5.0 | Przełączniki: S1 - 2 pozycje, 1 sekcja (ON/OFF) Złącza: CON1, S1 - goldpin 2x1 (męskie) CON2 - gniazdo zasilania DC-Jack CON3 - goldpin 3x1 (żeńskie) CON4 - goldpin 16x1 (żeńskie), wysokość 8-9mm nad PCB CON5 - goldpin 3x2 (męskie) Inne: U1 - podstawka DIP28 zwykła (wąska) CON4 - wyświetlacz LCD 2x16 znaków z przylutowaną listwą kołkową goldpin 16x1, o wysokości 9mm nad PCB. 2x tuleja dystansowa z gwintem wewnętrznym M2-M3, wysokość 11-12mm nad PCB. 4x śruba M2-M3, długość gwintu 4-6mm |